
Un pequeño robot subterráneo autónomo para entornos urbanos

28 de agosto de 2018
Este proyecto europeo coordinado por el Laboratorio de Robótica de la Universidad Carlos III de Madrid une a siete socios de cinco países con el objetivo de diseñar y desarrollar un sistema robótico autónomo capaz de excavar, maniobrar y mapear el subsuelo. Entre sus posibles usos estarían la construcción de canalizaciones, las investigaciones del subsuelo e incluso la ayuda en misiones de búsqueda y rescate.
El Proyecto BADGER que se enmarca dentro del programa Horizon 2020 busca una forma de resolver una situación común en muchas ciudades: la necesidad de perforar bajo tierra con el mínimo impacto exterior posible. Esto serviría para realizar canalizaciones de pequeño tamaño (fibra óptica, electricidad, agua) sin el coste y complicaciones que supone cavar zanjas o tener que levantar y rehacer otras instalaciones ya existentes. Según los investigadores actualmente tan solo se utilizan estos métodos en el 5% de los trabajos en las ciudades y generalizar su uso conseguiría un gran ahorro social tanto en costes como en menores molestias.
Carlos Balaguer –catedrático de Ingeniería de Sistemas y Automática y coordinador del proyecto– lo presenta informalmente como «un robot con aspecto de culebra que puede perforar el subsuelo por sí mismo, utilizando sensores y mapas». Según los bocetos y prototipos del proyecto su aspecto es efectivamente el de una «gran culebra mecánica» de casi 80 cm de longitud y 20 cm de diámetro, compuesta de varios módulos unidos entre sí: un cabezal de perforación, un mecanismo de propulsión, otro de dirección y guiado y otro para construir las paredes de soporte de los túneles. Su nombre es BADGER y equivale en español a la denominación del simpático tejón. Pero también se deriva de un término no tan sencillo: RoBot for Autonomous unDerGround trenchless opERations, mapping and navigation (Robot autónomo para operaciones subterráneas de mapeado y navegación sin zanjas).
Una combinación ingeniosa de nuevas tecnologías
Lo más interesante de este tipo de proyectos suele ser el tipo de tecnologías que incorporan, algunas nuevas, algunas ya existentes, pero siempre combinadas de formas ingeniosas. En el caso de BADGER:
- Se trata para empezar de trabajar bajo el terreno con movimientos autónomos, un entorno al que no está muy acostumbrado el sector de la robótica dado que las mayores experiencias hasta ahora han sido en entornos de superficie, aéreos o acuá Un auténtico terreno inexplorado para la robótica.
- Para la navegación autónoma el robot emplea georadares y mapas digitales, que le indican por dónde debe realizar la perforació Va equipado con sensores para evitar problemas imprevistos, tales como rocas o instalaciones subterráneas ya existentes. Además de eso lleva un Radar de Penetración de Suelo (GPR) y varias Unidades de Medición Inercial (IMU) para calcular situación respecto al entorno y su posición física en 3D.
- Para la adecuada construcción de las canalizaciones ha de reforzar las paredes que perfora, para lo cual se planea utilizar una impresora 3D en uno de los módulos, que va «imprimiendo paredes» a medida que avanza. Estas impresoras 3D que utilizan materiales como el hormigón y similares se han usado ya con éxito en muchos proyectos.
- Las técnicas de perforación son variadas e intercambiables: al tratarse de un diseño modular se pueden reemplazar las cabezas perforadoras dependiendo del tipo de terreno. Hay sistemas de perforación rotativa, de impacto y también una herramienta desarrollada durante el proyecto que emplea ultrasonidos y permite pulverizar las rocas y escombros.
- Con la idea de minimizar el impacto externo el robot BADGER se concibió con una máxima: «no cavar zanjas», lo que en inglés se denomina tecnología trenchless. La idea de este planteamiento era principalmente evitar tanto los molestos ruidos y el polvo como los cortes de tráfico y desvíos que pueden ser peligrosos y problemáticos para los ciudadanos..
Cómo funciona BADGER
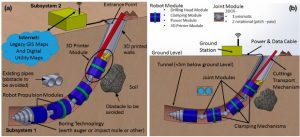
Como puede verse en los diseños preliminares el robot subterráneo se compone de varios módulos unidos mediante un sistema de juntas mecánicas que le proporcionan flexibilidad y movilidad. Es un sistema mecatrónico que mueve y gira la cabeza perforadora en todas direcciones y ángulos, buscando maximizar la maniobrabilidad del conjunto. De este modo el robot puede realizar giros en ángulos abiertos o cerrados, según sea necesario durante los trabajos; también puede operar en pendientes muy inclinadas, otro aspecto importante. La profundidad típica que puede alcanzar es de unos 5 metros bajo la superficie.
Aunque el robot sea autónomo hay una estación de control con él en todo momento: un ordenador que realiza todos los trabajos de supervisión y planificación, además de crear una representación digital del entorno y los objetos conocidos. Para esto utiliza los mapas y cartografías digitales disponibles, tanto del terreno como de las conducciones de electricidad, gas, agua y alcantarillado. Adicionalmente se utiliza un radar de superficie convencional para realizar el mapeado inicial del subsuelo antes de comenzar a perforar.
El robot está conectado con el exterior mediante un largo cable a través del cual se le proporciona la energía eléctrica y también sirve como conexión de datos (la estación central también dispone de conexión inalámbrica). El material excavado y pulverizado se extrae a través de un tubo accionado por una bomba convencional hasta el exterior. Tanto el cable como el tubo de extracción tienen la longitud suficiente para seguir al robot allá hasta donde llegue.
Más allá de los pequeños túneles
El proyecto BADGER puede acabar resultando ser una buena solución por su menor impacto externo a un coste razonable para la excavación de pequeños túneles y canalizaciones, pero también va algo más allá. Entre otras cosas está uniendo desde hace meses a ingenieros y científicos de varias países y diversas disciplinas en un proyecto común. Esto incluye a expertos en robótica, informática, georadar, ingeniería de perforación, ingeniería civil e incluso inteligencia artificial.

A medida que se vayan cumpliendo los ambiciosos objetivos del proyecto, que empezaron con el diseño inicial y los prototipos y acabarán con la integración final en un robot autónomo modular, reconfigurable, versátil y fiable, sus promotores tendrán que superar muchos retos.
Como extra –y más allá de su utilización en el ámbito de la ingeniería civil– los responsables del proyecto también han apuntado que incluso podría resultar un invento útil a la hora de colaborar en operaciones de búsqueda y rescate, por ejemplo cuando se producen derrumbamientos o hay que acceder, explorar o mapear lugares hasta los que una persona no tiene acceso directo – pero un pequeño robot subterráneo inteligente como BADGER quizá sí.



Todavía no hay comentarios