

Desde que Mercedes-Benz y la Universidad de Múnich desarrollaron el primer vehículo autónomo (VA) en los 80, se han dedicado enormes esfuerzos a esta tecnología. Si bien los VA a menudo se juzgan en relación con sus implicaciones, beneficios, desarrollo y desafíos tecnológicos, se ha prestado menos atención a la aceptación de su utilidad por parte de los usuarios. En este blog me gustaría revisar los aspectos que influyen en la percepción que el público general tiene del VA, centrándonos en las implicaciones que el grado actual de desarrollo tecnológico tiene en cuestiones como seguridad, ética, responsabilidad jurídica y legislación, y cómo estas últimas influyen en la aceptación del VA por parte de los usuarios.
La seguridad en los VA
Si bien los VA tienen el potencial de aumentar la seguridad del tráfico debido a que evitan el componente humano (el error humano provoca más del 90% de los accidentes), aún existe la posibilidad de que sea el vehículo el que falle, por muchos motivos, como condiciones ambientales extremas, o en general por la gran variedad de situaciones y escenarios en los que los VA puedan estar involucrados que no se hayan contemplado de antemano. Estas razones hacen que, conseguir que el VA se comporte de manera segura en cualquier situación, sea un proceso altamente sofisticado que requiere un alto nivel de cooperación y coordinación entre múltiples disciplinas, desde inteligencia artificial o machine learning, hasta sensórica o procedimientos de test. En este punto, es interesante conocer el grado de desarrollo tecnológico de los VA como soporte para entender sus implicaciones en seguridad.
Tecnología utilizada en los AV: fusión de sensores, visión por computadora y tolerancia a fallos
- Percepción
Si bien la percepción de objetos es una tarea difícil, los ingenieros han desarrollado sistemas basados en la diversidad (diferentes tipos de sensores) y redundancia (duplicidad de sensores) para optimizar la precisión de las medidas y asegurar el funcionamiento ante fallos. Para proporcionar la información del entorno necesaria para operar de manera segura, habitualmente se utilizan tres tipos de sensores: cámara, radar y lidar. Si bien las cámaras son la mejor forma de visualización, tienen sus propias limitaciones. Una cámara no puede calcular la distancia a los objetos con precisión y, en muchos casos, les resulta difícil detectar objetos en condiciones de baja visibilidad, como niebla, lluvia, nieve o durante la noche. Los radares contribuyen a reforzar la detección de las cámaras en condiciones de baja visibilidad y medir velocidades y distancias con mayor precisión. De hecho, la mayoría de los automóviles convencionales que se utilizan hoy en día cuentan con cámaras y sensores radar en sus sistemas de ayuda a la conducción, asistencia al estacionamiento y otros.
Sin embargo, la información proporcionada por cámaras y radares no es suficiente para que un vehículo funcione de manera autónoma y por ello, el sistema se refuerza con sensores lidar, capaces de medir distancias de manera ultra precisa. Esta tecnología se basa en el uso de láseres pulsantes que permiten la construcción de imágenes 3D con muy alta definición. Adicionalmente, los desarrolladores utilizan los tres tipos de sensores a la vez para mejorar la percepción a través de un proceso que se llama fusión de sensores.
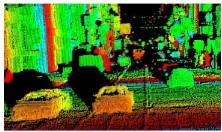
Imagen de la nube de puntos generada por un lidar
La fusión de sensores (sensor fusión) se puede definir como el proceso de combinar datos de diferentes sensores para mejorar el rendimiento y precisión del vehículo, que no se puede lograr con un solo sensor. Durante el proceso de fusión, las entradas de los sensores se introducen en un ordenador central de gran capacidad de proceso que combina los datos y ejecuta la toma de decisiones. Al utilizar la información procedente del conjunto de sensores, el sistema se hace resistente a fallos de los sensores individuales y además proporciona redundancia, ya que una misma área queda cubierta por diferentes sensores, mejorándose la toma de decisiones.
- Toma de decisiones
Si bien la detección es una tarea importante, los AV deben interpretar el entorno para tomar decisiones. Los fabricantes utilizan inteligencia artificial y aprendizaje automático (machine learning) para soportar esta toma de decisiones. Estas tecnologías se basan en el entrenamiento del sistema a partir de un número masivo de datos y situaciones.
- Navegación
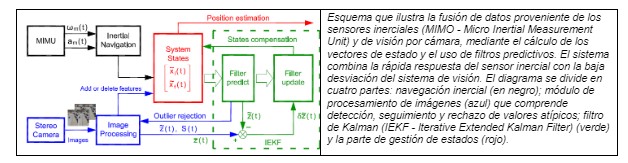
De manera simplificada, el proceso de navegación es una sucesión de la posición espacial del vehículo en el tiempo. La posición del vehículo en cada instante viene definida por una serie de parámetros que constituyen lo que se conoce como estados del sistema. Navegar un vehículo consiste en estimar su estado a lo largo del tiempo. En general, los métodos de estimación de estado se basan en la teoría de control, que emplea las leyes de probabilidad para calcular un vector de estado a partir de un vector de medidas. Existen tres métodos de estimación de estado que se utilizan en la conducción autónoma: machine learning, filtro Kalman y filtro de partículas.
- Visión artificial
Los algoritmos de procesamiento de imágenes necesarios para que un VA funcione de forma segura son extremadamente complejos. Además, los VA deben estar equipados con la potencia necesaria para procesar imágenes a bordo, de modo que el vehículo pueda reaccionar al mundo que lo rodea y evitar objetos. Otro desafío es la plataforma hardware requerida para el procesamiento de imágenes, que debe ser suficientemente ligera, pero a la vez capaz de proporcionar la potencia de procesamiento requerida, con un bajo consumo y capaz de operar de manera robusta durante mucho tiempo.
- Tolerancia a fallos
El período en que los datos se entregan en un estado defectuoso se denomina período de interrupción del servicio. Hay cuatro enfoques principales para evitar los períodos de interrupción de servicio de acuerdo a cómo se tratan los fallos del sistema: prevención, eliminación, predicción y tolerancia. Mientras que la prevención y eliminación de fallos se centran en evitar o eliminar fallos, los enfoques de predicción y de tolerancia a fallos se basan en mantener el sistema operativo en presencia de fallos y evitar comportamientos no planificados.
Para procesos extremadamente complejos, no siempre es posible implementar un sistema de control libre de fallos, por lo que los enfoques de predicción y tolerancia a fallos son los enfoques preferidos. Para los VA, el enfoque de tolerancia a fallos es el más utilizado.
El objetivo principal del Control Tolerante a Fallos (CTF) es detectar de manera temprana y eficiente los fallos y permitir que el sistema funcione convenientemente incluso con la presencia de alguno de esos defectos. Los modelos matemáticos son ampliamente utilizados en sistemas de CTF porque sus parámetros en general se pueden obtener fácilmente. Sin embargo, en tareas complejas, es difícil desarrollar un modelo matemático preciso y representativo del sistema, o incluso podría no ser posible. En esos casos, se utilizan otras técnicas, como las redes neuronales, para la detección y el diagnóstico de fallos.
Después de identificar el error, se utilizan dos métodos para la recuperación de fallos: redundancia directa o redundancia analítica. En la primera, se emplea un módulo adicional para reemplazar el componente defectuoso. Sin embargo, la redundancia analítica implica utilizar el resto de los módulos que sí funcionan para complementar las tareas de los que fallaron.
El problema ético
Además de la seguridad, hay otros aspectos que influyen en la aceptación del uso de VA por parte del público general. Los VA se enfrentan a un dilema ético similar a la famosa paradoja del tranvía, sin embargo, en el caso de los VA esta paradoja se produce continuamente. El problema principal es que, a diferencia de los conductores humanos, la decisión de los VA sobre cómo comportarse está predefinida por un programador. Este dilema tiene una influencia significativa en la aceptación de los VA.
Responsabilidad jurídica de los VA
Al igual que la seguridad y las cuestiones éticas, la responsabilidad jurídica y la legislación tienen una influencia significativa, si no crítica, en la aceptación del VA. Uno de los principales desafíos a que se enfrenta la introducción de los VA son los cambios necesarios en las leyes para adaptarse a la conducción autónoma. Y la pregunta clave es: ¿pueden los VA conducir? Uno de los beneficios fundamentales de la conducción autónoma es permitir que el conductor humano participe en otras actividades durante su viaje más allá de la conducción. El problema principal es que la mayoría de los países consideran al conductor humano único responsable en caso de error o accidente. Por lo tanto, si la ley no le exime de esta responsabilidad y se le exige al conductor que mantenga la atención en la carretera mientras el automóvil está en movimiento, entonces, ¿cuál es la diferencia entre los VA y el vehículo convencional? En tal caso, ¿aceptará la gente comprar un vehículo así? Aparentemente, como en otros muchos casos relacionados con la tecnología, la regulación está por detrás del desarrollo de los VA en lugar de tomar la iniciativa.
Otros factores a tener en cuenta: La pandemia del COVID19
Los VA tienen el potencial de ayudar a las personas en su lucha contra las pandemias. Los VA se han usado para transportar personas o entregar alimentos y medicamentos durante el confinamiento provocado por la pandemia del COVID19, lo que ha provocado un mayor interés sobre los sistemas de conducción autónomos, ha abierto los ojos de los consumidores a los beneficios de los VA y, a su vez, ha aumentado el entusiasmo del público por ellos.
Observaciones y recomendaciones para el futuro
Seguridad: la seguridad de los coches autónomos es primordial. Si los vehículos no son seguros, son significativamente menos deseables, independientemente de sus beneficios. La seguridad percibida, o más bien la falta de seguridad percibida de los VA, es lo que realmente influirá en las opiniones de los compradores potenciales. Dicho esto, los fabricantes deberían poner mayor énfasis en los sistemas de seguridad que incorporan en sus VA y demostrarle al público que utilizar este tipo de vehículos no tiene riesgo.
Responsabilidad: el sector debe forzar a que se desarrollen leyes exhaustivas y razonables para los automóviles autónomos. Solo cuando los VA sean totalmente seguros y las leyes sean satisfactorias, la gente juzgará si el costo de estos vehículos merece la pena o no.
Dilema ético: uno de los principales problemas de los VA es que, a diferencia de la conducción humana, la decisión de los VA sobre cómo comportarse ante una situación extrema está predefinida por un programador. Actualmente, la manera en cómo se diseña o se asigna esta toma de decisión es un problema no resuelto y se requieren más estudios para tomar la decisión adecuada en situaciones similares y comprender la aceptación social de las diferentes alternativas. Estas preocupaciones tienen una gran influencia en la aceptación pública de los VA y que no se resuelvan, el precio del vehículo es irrelevante.



Todavía no hay comentarios