¿Y si una carretera en Marte esconde la llave del futuro de la exploración espacial?

23 de noviembre de 2020
En la seguridad de la Tierra, los seres humanos damos muchas cosas por sentadas. Este es nuestro hogar y llevamos millones de años adaptándonos a vivir en él, a movernos en él. Desplazarse siempre ha sido una prioridad para nuestra especie y hoy lo hacemos con más facilidad, rapidez y eficiencia que nunca. Nos subimos en un medio de transporte y a través de caminos bien trazados, lisos y seguros llegamos de un punto a otro.
En Marte, sin embargo, las cosas son muy diferentes. Ambos planetas pueden parecerse en muchos aspectos, pero son entornos muy diferentes para la movilidad. Desde que el Sojourner de la NASA se convirtió (en 1997) en el primer vehículo humano en circular por el planeta rojo, ha quedado claro que moverse por allí iba a ser bastante más complicado que en la Tierra. Resolver los desafíos de trazar un camino en Marte es también resolver los retos del futuro de la exploración espacial.
La importancia del primer camino
Después del rover Sojourner llegaron Spirit, Opportunity (operativo durante casi 15 años) y Curiosity, el único vehículo que sigue activo en la superficie marciana. Dos más están en camino y tienen previsto empezar a rodar entre febrero y mayo del año que viene. Son Tianwen-1, de la CNSA, la administración espacial china, y Perseverance, de la NASA. Para ambas misiones, lograr aterrizar en Marte será ya todo un éxito. Y, al mismo tiempo, las dificultades no habrán hecho más que empezar.
En el momento en que la nave espacial de cualquiera de estas misiones entre la atmósfera marciana, perderá contacto con la Tierra. Pasarán unos siete minutos hasta que en el centro de control se sepa si el vehículo se ha posado pacíficamente sobre la superficie o se ha perdido para siempre. Este descenso controlado y automatizado es una auténtica obra de arte de ingeniería espacial, pero volvamos al rover.
Una vez en tierra marciana el vehículo inicia un proceso de seis pasos antes de empezar a moverse con cierta seguridad. Lo primero es desplegar los ojos (el sistema de cámaras panorámicas) y las herramientas de comunicación. Después llega el momento de caracterizar el terreno y comprobar que todo está orden. El tercer paso es poner en marcha el sistema de movilidad. Es decir, desplegar las ruedas y levantar el vehículo del suelo.
El siguiente movimiento es el más importante desde el punto de vista científico. El vehículo debe comprobar que todos los instrumentos a bordo funcionan correctamente. Una vez recibe el OK, es hora de seleccionar el primer camino, el más importante, el que llevará al vehículo a completar su primer paseo alejándose del lugar de aterrizaje.
A partir de ahí, empieza el paseo. El rover estará controlado desde Tierra, pero necesitará observar y medir constantemente el terreno a su alrededor para trazar su propia carretera, aquella que lo lleve a cumplir sus objetivos científicos, pero también que lo mantenga sano y salvo.
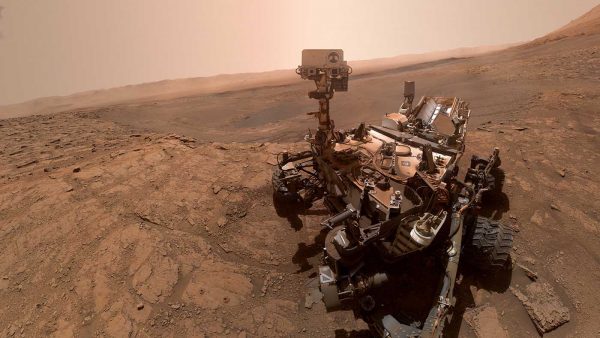 Imagen real de un selfi tomado por el rover Curiosity en 2019, en el día 2.553 de su misión. | NASA
Imagen real de un selfi tomado por el rover Curiosity en 2019, en el día 2.553 de su misión. | NASA
Mapas en tiempo real ante la ausencia de carreteras
Aunque cada vez se conocen más aspectos de la geografía marciana, nuestro vecino espacial es todavía un gran desconocido. El rover se mueve por territorio inexplorado, así que mucha de la información que recabe sobre el terreno le será de gran utilidad (tanto para él como para las misiones futuras). Por ello, los mapas son clave.
En la actualidad, el rover Curiosity se detiene, aproximadamente, cada 30 centímetros. Es decir, no avanza más de un par de palmos sin comprobar el terreno a su alrededor. Cada vez que se detiene, el vehículo toma una serie de medidas (unos 10.000 puntos de datos en total) que utiliza para generar un modelo tridimensional del terreno que tiene ante sí. En función de los resultados obtenidos, propone una serie de rutas seguras. Por ejemplo, si tiene un objeto de más de 30 centímetros de alto justo delante, propondrá rodearlo.
A medida que acumula más y más modelos, estos se organizan en un mapa a tiempo real de los 100 metros cuadrados que rodean el vehículo. Las capacidades de memorización de Curiosity son limitadas, así que cada cinco metros de avance lineal, la mayor parte de la información se borra. El rover ‘se olvida’ de por dónde acaba de pasar. Sin embargo, parte de estos datos se almacenan y otra parte se envía a la Tierra.
En el planeta azul, estos datos se suman a la información más precisa recabada por los instrumentos que orbitan Marte, como el Mars Orbiter Laser Altimeter (MOLA), operativo entre 1997 y 2001 o la cámara High Resolution Imaging Science Experiment (HiRISE), en funcionamiento desde 2006. El resultado son modelos digitales del terreno (DTM, por sus siglas en inglés) similares a los que se usan en la Tierra y que sirven para entender mejor Marte y facilitar el trabajo de las misiones futuras.
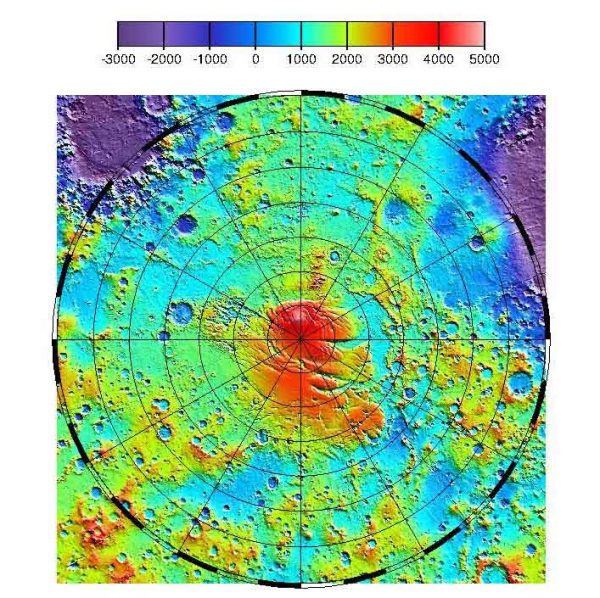 Mapa topográfico elaborado por el instrumento MOLA de la NASA. | NASA
Mapa topográfico elaborado por el instrumento MOLA de la NASA. | NASA
100 metros en línea recta (o ninguno)
El Curiosity se mueve impulsado por el Sol. Sus paneles fotovoltaicos generan la energía justa para moverse, así que solo puede desplazarse durante el día. Aun así, en condiciones óptimas, este vehículo puede moverse y mapear alrededor de 100 metros en un día marciano (denominado sol, dura 24 horas, 39 minutos y 35 segundos). De media, se desplaza unos 40 metros diarios.
En la Tierra sabemos la distancia que hemos recorrido en un vehículo de muchas maneras. La más sencilla es fiarse de un odómetro, un instrumento habitual en los coches que cuenta las vueltas que dan las ruedas. Como la longitud de la circunferencia de la rueda es conocida, una simple multiplicación por el número de vueltas nos dará la distancia recorrida. Eso, claro, siempre que el vehículo se desplace sobre una superficie uniforme.
En Marte, los vehículos también tienen un odómetro. El problema es que quizá las ruedas estén patinando sobre grava o arena un buen rato antes de poder agarrarse al suelo e impulsar el rover. Es decir, hay bastantes probabilidades de que la distancia que mide el odómetro se aleje de la distancia real recorrida. Y si no se puede confiar en las mediciones del espacio, no se puede confiar en los mapas ni en las rutas trazadas.
Para evitar problemas, las mediciones del odómetro se complementan con un software de análisis de imagen que permite al vehículo tomar sus propias decisiones en base a los riesgos presentes en la ruta. Es por eso que cada 10 segundos o 30 centímetros el vehículo se detiene, comprueba que se ha desplazado lo que pensaba haberse desplazado y se asegura de que no haya obstáculos inesperados en el horizonte.
Allí, en la soledad del planeta rojo, a millones de kilómetros de casa, la seguridad es la máxima prioridad. Un paso en falso puede echar al traste la misión y poner en jaque el futuro de la exploración espacial. Así, poco a poco, los vehículos robotizados irán abriendo los caminos que, quizá, un día, recorran los seres humanos.



Todavía no hay comentarios